6DOF Robotic Arm Project
January 2024 - January 2025
Problem / Objective
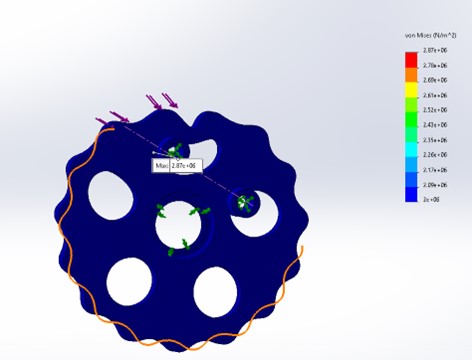
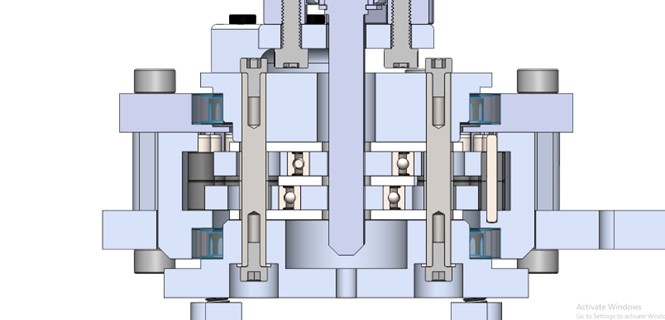
This was a solo design project I took on in partnership with the Space Concordia Robotics Division. I built a fully custom 6DOF robotic arm after we were introduced to cycloidal gearboxes, which caught my interest for their low backlash and high efficiency. I dove deep into research—learning about stress analysis, ideal gear ratios, and how these gearboxes are used in real applications.
Outcome / Contributions
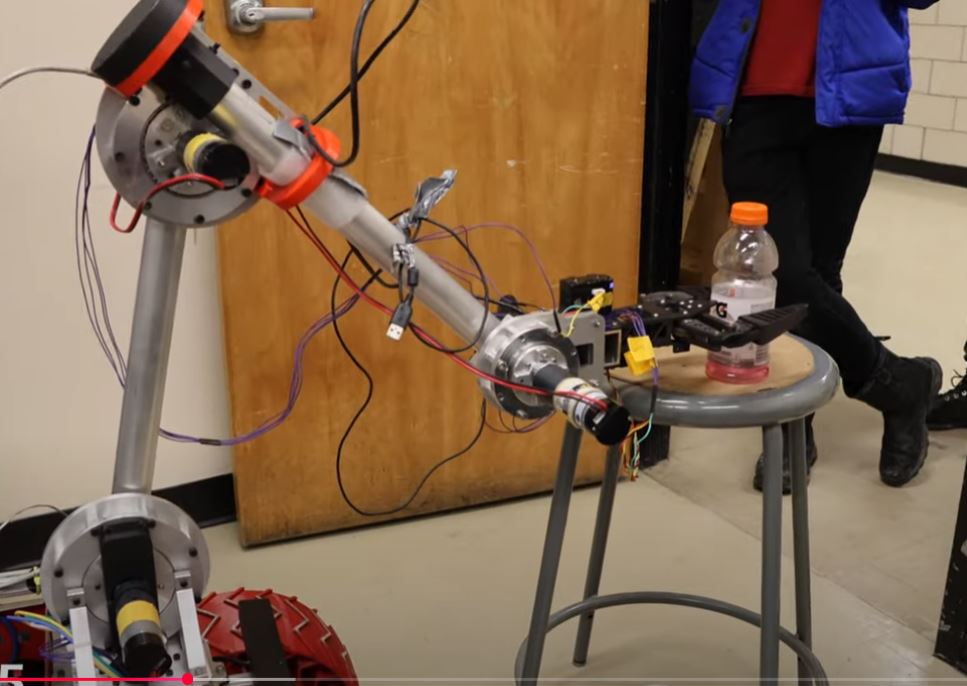
The design was inspired by both the Curiosity rover's arm and industrial robots like those from KUKA and ABB. Over about four months, I developed the full mechanical design from scratch. The final arm weighed around 11 kg and was able to lift 5 kg at full reach (1.2 meters), all while maintaining a wide range of motion and solid stiffness with minimal backlash.
I first tested the gearbox assemblies in-house, then worked with several manufacturers to get the rest of the parts made in time. I also handled the design side for encoder mounts, hard stops, and everything needed for smooth integration with our systems. This was a full end-to-end build, from research and CAD to getting physical parts made and tested.
Images



Skills and Technical Details Gained
- Hands-on experience with stress and deflection analysis for load-bearing robotic parts.
- Learned practical methods for designing robotic arms, including encoder placement and motion limits.
- Explored and applied cycloidal gearbox theory for high-torque, low-backlash joints.
- Worked with both in-house and outsourced manufacturing—learning to balance speed, cost, and quality.
- Improved my design process by mixing performance goals with real-world constraints like weight, budget, and deadlines.
This project gave me a much better understanding of arm design, mechanical precision, and how to go from an idea to a working, manufacturable system—especially when you're the one owning the full pipeline.