Software-lead
Helped worked of the ROS2 setup of the robotics team
Helped worked of the ROS2 setup of the robotics team

Designed and built a custom six degrees of freedom robotic arm for precise and versatile applications.
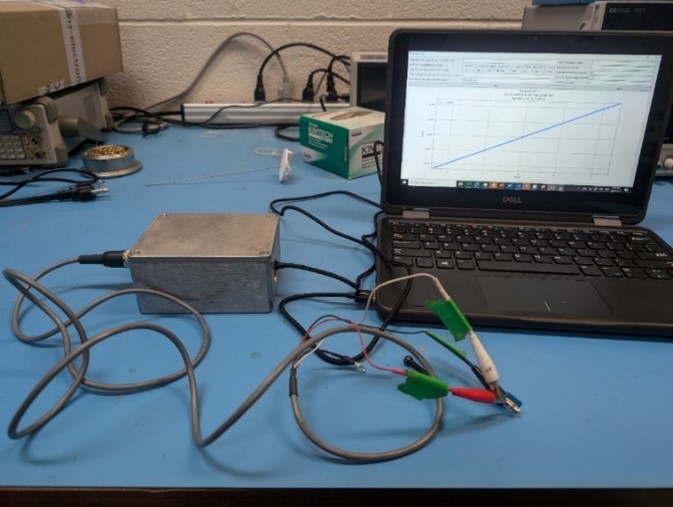
Masters thesis on an affordable potentiostat for electrochemical analysis, enabling accessible scientific research.

Created an automated laboratory system for simulated mars rover applications.
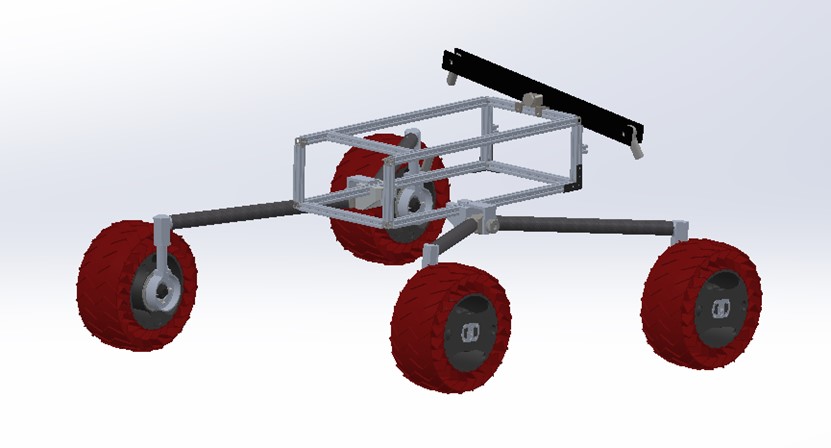
Engineered a suspension system for Mars-like rovers, enhancing mobility and stability on rough terrain.
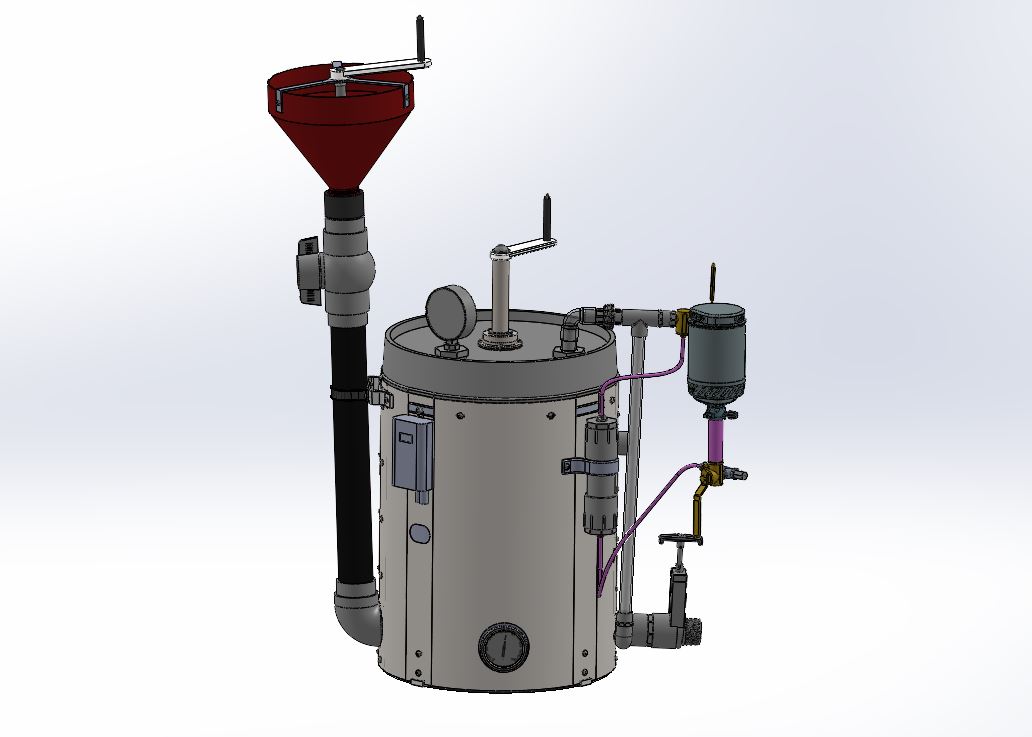
A capstone project designed to create a compact anaerobic digester for sustainable biogas production at home.
Mechanical Engineer with a strong background in designing, prototyping, and testing advanced mechanical systems. As the Mechanical Lead at Space Concordia, I directed the development of Mars-like rovers, including 6-axis robotic arms and rocker-bogie suspension systems. I am passionate about combining CAD design, rapid prototyping, and interdisciplinary collaboration to deliver innovative solutions. Currently pursuing a Master of Science in Mechanical Engineering, I specialize in system integration, energy-efficient designs, and sustainable engineering.
September 2023 – December 2024
Concordia University, Montreal, Quebec
January 2021 - April 2021
Bombardier Inc., Côte-Vertu, Quebec
August 2019 - December 2019
MPB Communication Inc., Pointe-Claire, Quebec